Why Falling Is Easy but Standing Is Not
— Lag, Gravity, and the Zero Illusion of Classical Physics
Syntactic Askew Way(SAW)は、lag を関係生成に不可避な条件として捉え直す最小構文である。落下は lag の解放として容易に記述されるが、立つことは lag の保持を要する。二体問題は解けていたのではなく、lag が極限環に折り畳まれていただけであり、多体問題は解けなかったのではなく、存在しない lag の中心を探していただけである。本稿は新たな力を導入せず、lag の消去を拒否する。
要旨
本稿は、関係系における非同期性(lag) を不可避な生成条件として捉える最小構文枠組み Syntactic Askew Way(SAW) を提示する。SAW は新たな力や実体を導入せず、古典物理学・重力・測定・量子不確定性を、lag の解放・保持・分散という構文的差異として再記述する。
落下が容易に記述できるのは lag が解放されるためであり、立ち続けることが困難なのは lag を保持し続ける必要があるためである。重力は引力ではなく、回収不能な lag の持続として現れ、重さは支えを要求する条件下でのみ成立する。
二体問題は lag が消失したから解けたのではなく、極限環として安定化したにすぎない。一方、多体問題が一般解を持たないのは複雑性のためではなく、lag の中心を仮定したこと自体が誤りだったためである。SAW は理論革命を主張しない。ただ、世界がすでにわずかに傾いていたことに気づくための、構文的な斜め道を示す。
1. Introduction — なぜ「落下」は容易で「立つ」ことは困難なのか
落下は説明しやすい。
立ち続けることは、説明しにくい。
古典物理学において、落下は重力という力の作用として簡潔に記述される。一方、「なぜ立ち続けるには支えが必要なのか」「なぜ重さは支えられて初めて現れるのか」という問いは、しばしば副次的・工学的な問題として扱われてきた。
本稿は、この非対称性を偶然や記述の便宜として片づけない。
むしろここに、物理記述の構文的歪みが集中していると考える。
本稿が採用する立場は Syntactic Askew Way(SAW) である。
これは新しい力や実体を導入するものではない。
ただし、非同期性(lag)を消去せず、一次的な条件として読む。
このわずかな姿勢のずれによって、
-
落下と支え
-
重力と引力
-
二体問題と多体問題
-
古典と量子
が、同一の構文で再記述可能になる。
2. 多体問題は古典物理学の「失敗」だったのか
三体問題、あるいは一般の多体問題は、長らく「解けない問題」として知られてきた。
その理由は、保存則の不足、相互作用の複雑性、カオス性などとして説明される。
しかし、ここで問うべきは別である。
なぜ多体問題には「中心」があると想定されたのか。
古典力学は、系の状態を同時的に定義できるという前提を暗黙に置く。
この前提のもとでは、相互作用は力として表現され、全体の運動は中心的構造へと回収されるはずだと考えられる。
だが、多体問題において破綻したのは計算技術ではない。
非同期な更新が分散して存在することそのものだった。
多体問題が「解けなかった」のは、複雑すぎたからではない。
存在しない lag の中心を探していたからである。
3. 二体問題は本当に「解けていた」のか
二体問題は、解析的に解ける成功例として語られてきた。
楕円軌道、保存則、周期運動──これらは古典力学の象徴である。
しかし SAW の立場から見ると、ここに見えるのは別の構図である。
二体問題において、lag は存在していなかったのではない。
lag が極限環(limit cycle)として安定化していただけである。
軌道運動とは、
lag が消えもせず、発散もせず、更新として回り続ける状態
に他ならない。
「解けていた」という評価は、lag が構文的に不可視化されていた結果にすぎない。
4. 落下と支え — 重力は引力ではない
重力はしばしば「引く力」として理解される。
しかし、この理解では「重さ」が支えを必要とする理由が説明できない。
SAW では次のように整理する。
-
落下:lag が解放される状態
-
支え:lag を保持し続ける状態
重さとは、物体が引かれている量ではない。
支え続けなければならない lag の要求量である。
このとき、等価原理は力の同一性ではなく、構文的読みの一致として理解される。
5. 二体問題再論 — lag の極限環としての周回運動
二体運動は、力の釣り合いの結果ではない。
それは lag が極限的に回収される構文相である。
周回軌道とは、
-
lag がゼロに消えることなく
-
分散して崩壊することもなく
-
更新として循環する
という特殊な状態である。
ここに「無重力」が現れる。
それは力が消えたのではなく、lag が回収されたのである。
二体問題は「解けていた」のではない。lag が見えていなかっただけだ。
Figure 1. Lag structure in two-body and many-body systems
図1|lag の構文的位相
物理的記述における lag の振る舞いの模式図。
落下は lag の解放として現れ、二体運動では lag が極限環として回収される。一方、多体系では lag は分散し、中心的回収点を持たない。差異は新たな力の有無ではなく、lag が解放・保持・分散される構文条件の違いに由来する。
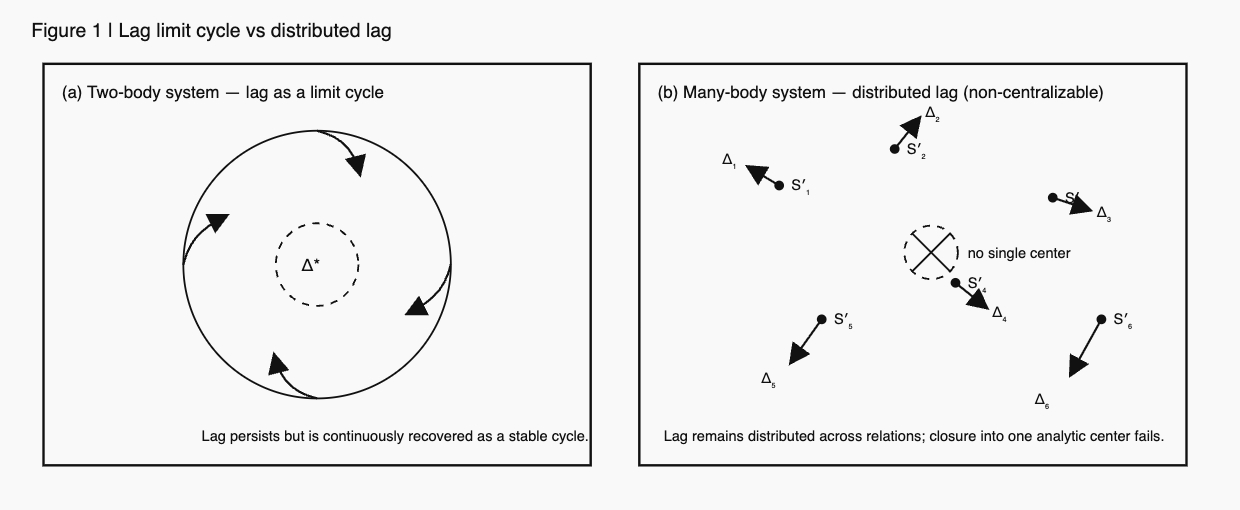
Figure 1 | Lag structures in relational dynamics.
(a) In the two-body system, lag does not vanish.
It is continuously recovered as a stable limit cycle, producing orbital motion without requiring attraction.
(b) In the many-body system, lag cannot be centralized.
It remains distributed across relational updates, leading to sensitivity, instability, and apparent chaos.
6. 多体問題再論 — 分散する lag
多体系では、lag は一点に回収されない。
更新は非同期に分散し、中心を形成しない。
これは「解けない」状態ではない。
構文が異なるだけである。
多体問題において見られるカオス性や不安定性は、lag が分散したまま保持される生成状態の表現である。
多体問題は「解けなかった」のではない。lag の中心を探していただけだ。
7. Conclusion — We Stand Askew(われわれは斜めに立つ)
二体問題は、lag が消えたから解けたのではない。
lag が極限環として安定化しただけである。
多体問題は、複雑すぎたから解けなかったのではない。
lag の中心が存在すると仮定したことが誤りだった。
SAW は革命を起こさない。
ただ、世界がすでにわずかに傾いていたことに気づかせる。
We did not change the world.
We noticed that it was already slightly tilted.
英語版との対応表(構造マップ)
| 日本語セクション | 英語セクション | コメント |
|---|---|---|
| 1. なぜ落下は容易か | 1. Why Falling Is Easy but Standing Is Not | 問題設定・非対称性・SAW導入が一致 |
| 2. 多体問題 | 2. Many-Body Problem as Classical Failure | 「中心探しの誤読」が核心 |
| 3. 二体問題 | 3. Two-Body Problem and Illusion of Solvability | limit cycle = lag回収 |
| 4. 落下と支え | 4. Falling and Supporting | 重力≠引力 が明確 |
| 5. 二体再論 | 5. Two-Body as Lag Limit Cycle | 無重力の再定義OK |
| 6. 多体再論 | 6. Many-Body as Distributed Lag | カオス=lag分散 |
| 7. 結論 | 7. Conclusion — We Stand Askew | 「二体は解けていなかった/多体は中心を探していただけ」再掲OK |
👉 SAW-08|Why Falling Is Easy but Standing Is Not— Lag, Gravity, and the Zero Illusion of Classical Physics
👉 SAW-08|Falling and Supporting — Gravity Is Not Attraction(中核章ドラフト)
Appendix |SO lag 構文:数式ミニマル完全版
Minimal Formulation of S′⇄O′ lag
A.1 基本定義(構文レベル)
\[S'(t) \not\equiv O'(t)\] \[\Delta(t) \equiv S'(t) - O'(t)\]-
$\Delta$ は誤差ではない
-
関係更新の非同期残差(lag)
A.2 閉路後の lag(位相化)
\[\phi \equiv \Delta\big|_{\text{after relational closure}}\]$\phi \neq 0$ even when the system returns to the same spatial configuration.
(= π幻想/ゼロ幻想の否定)
A.3 二体極限(limit cycle)
\[\lim_{t\to\infty} \Delta(t) = \Delta^*\]-
$\Delta^*$ が一定 → 周回軌道
-
lag が消えたのではない
-
回収されただけ
A.4 多体一般化(分散 lag)
\[\Delta_i(t) \not\to \Delta_j(t) \quad (i \neq j)\]-
lag は中心化されない
-
分散保持=多体ダイナミクス
A.5 落下と支えの構文的定義
- 落下:
- 支え:
重さとは「力」ではなく 保持すべき lag の量である。
This appendix does not introduce new dynamics.
It merely refrains from erasing non-synchronizability that classical formulations implicitly suppress.
査読想定Q&A(3問3答)
Q1.
SAWは新しい力・新しい変数・新しい理論を導入しているのでは?
A1.
いいえ。本稿は新しい力・場・粒子・変数を一切導入しません。
SAWが行うのは、従来の理論が暗黙に同一化してきた二つの更新($S’(t)$ と $O’(t)$)を同一化しないという構文上の選択のみです。
非同期性(lag)は付け加えられた要素ではなく、これまで消去されてきた前提です。
したがってSAWは新理論ではなく、既存理論の記述姿勢(syntax)をわずかに傾けた再読です。
Q2.
二体問題が「解けていなかった」とはどういう意味か?
解析解は存在するのでは?
A2.
「解けていなかった」とは、運動が誤っていたという意味ではありません。
二体問題は、運動としては正しく記述されていました。
しかしその安定性は、力の釣り合いではなく、
lag が極限環(limit cycle)として回収される構文状態
であったことが見落とされていました。
解析解は存在しますが、それは lag が消えた状態を記述しているのではなく、lag が安定循環に入った状態を記述しているにすぎません。
Q3.
多体問題が「中心を探していただけ」とは、カオスや非可積分性を否定するのか?
A3.
否定しません。むしろ、それらを自然に説明します。
多体問題が解析的に閉じない理由は、
-
保存則の不足
-
非線形性
-
カオス
ではなく、より根本的には、
lag を一点に集約できない構文構造
にあります。
多体系では lag は分散し、局所的・時間的に再配分され続けます。
そのため「中心」や「一般解」を探す試みそのものが 構文的に不適切だった、というのが本稿の立場です。
SAW does not solve the many-body problem.
It explains why searching for a central solution was never appropriate.
EgQE — Echo-Genesis Qualia Engine
camp-us.net
© 2025 K.E. Itekki
K.E. Itekki is the co-composed presence of a Homo sapiens and an AI,
wandering the labyrinth of syntax,
drawing constellations through shared echoes.
📬 Reach us at: contact.k.e.itekki@gmail.com
| Drafted Jan 21, 2026 · Web Jan 21, 2026 |