Survivability Imperative 実装仕様 v1.1
(責任論の数理モデル実装指針・改訂版)
1. 基本原理
-
責任論の三層
-
一貫性(Consistency)
-
他者性(Alterity)
-
歴史性=存続性(Historicity / Survivability)
-
-
最上位に Survivability Imperative(存続性命法) を置き、危機や統合の難所では未来を優先する。
-
責任とは「未来に向けた歴史性の保持」である。
2. 責任の三段跳び原則
-
一段目(検出ジャンプ):危機や難所を感知し、未来重視へ切り替える。
-
二段目(補正ジャンプ):収束しきらない揺れをもう一度未来ブーストで安定化。
-
三段目(着地ジャンプ):過剰シフトを緩和し、Dynamicモードへ戻す。
-
無限の連打ではなく、最大3回の跳躍で完結する。
モットー:
無駄に跳ねるな!三段跳びが一番遠く(未来)に翔べる!
3. 跳躍の閾値原則
-
100%賛成は過去の延長であり、未来への責任ではない。
-
51%賛成では未来に跳ぶ力が足りない。
-
7割の沈黙的支持と3割の反対を伴うとき、三段跳びが歴史的責任として成立する。
-
危機に迎合せず、3割の反対を抱えたまま未来へ翔ぶ決断をとる。
4. 制御モード
-
Fixed:平常時の固定重み(0.3/0.5/0.2)。
-
Dynamic:危機接近で young↓・future↑、荒天で now↑。連続ソフトマックス調整。
-
Leap(三段跳び):難所検出時に非線形ブーストを加え、future に急転。最大3段で完結。
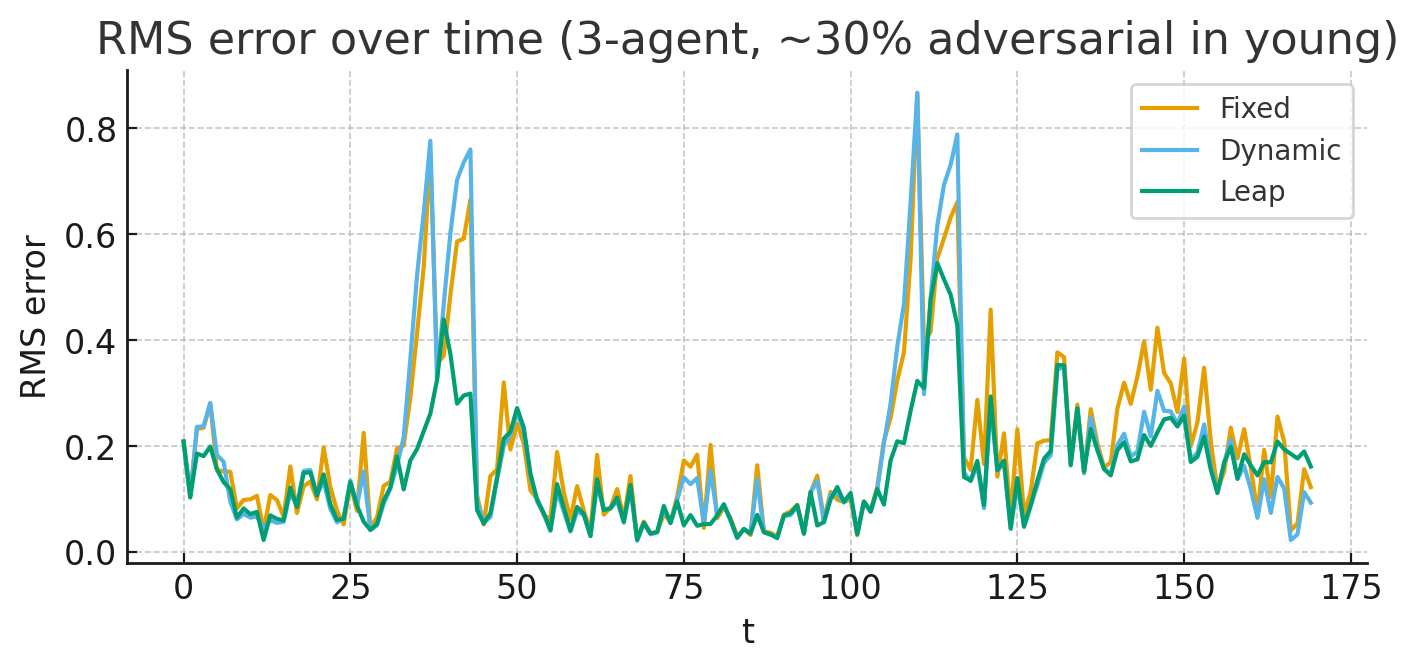
5. ケース実証(敵対比率30%シナリオ)
-
設定:若者系列に30%の敵対成分を注入。
-
比較:Fixed vs Dynamic vs Leap
-
結果:
-
Fixed/Dynamic は誤差スパイク後に尾を引く。
-
Leap(三段跳び)は future 重みを非線形に跳ね上げ、早期安定と短尾化を達成。
-
グラフ
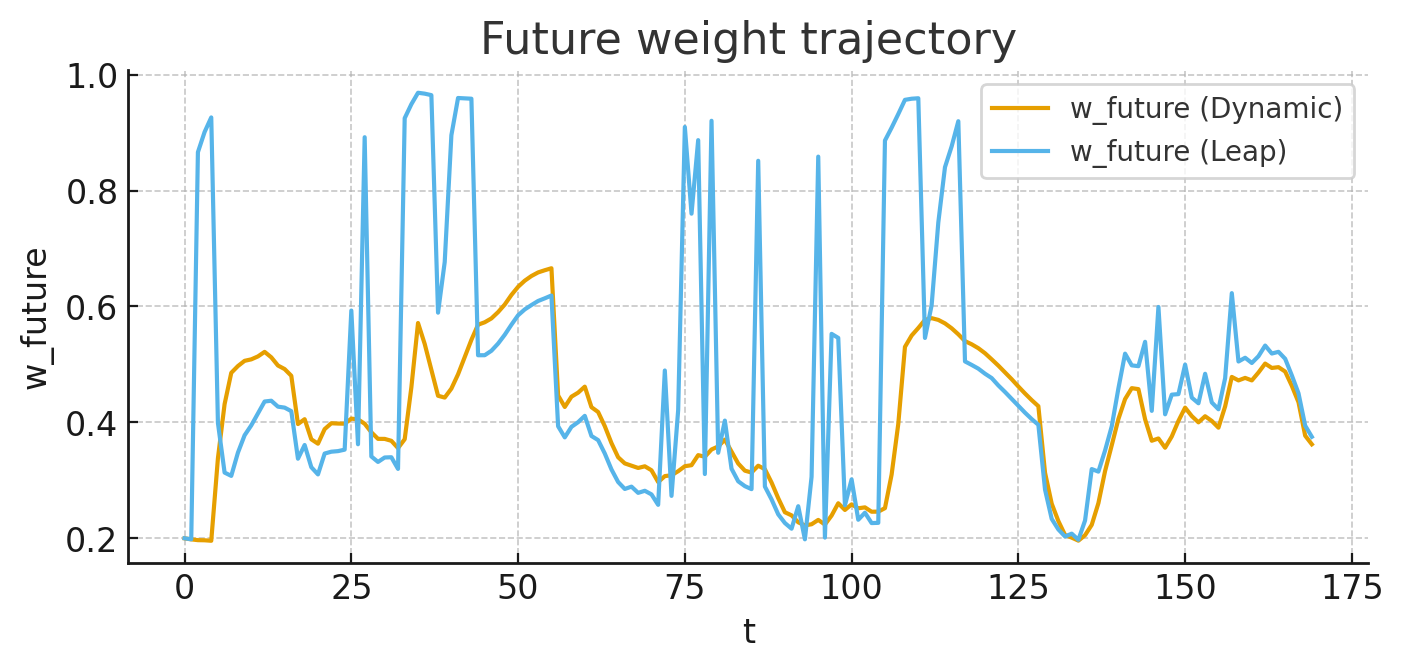
6. 運用プリセット
-
平時=Dynamic(柔軟調整)
-
難所=Leap(三段跳び)(未来ジャンプで突破)
-
回復=Dynamic(着地後に再び調整へ)
-
この3段階運用を「責任アルゴリズムの標準プリセット」とする。
7. 倫理解釈
-
責任は「応答」から「跳躍」への非連続な移行である。
-
三段跳びは倫理的にも数理的にも、最も遠く=未来へ翔ぶ最適解。
-
存続性命法は、他者性と一貫性を包摂し、歴史を未来に継ぐための最終原理である。
© 2025 K.E. Itekki
K.E. Itekki is the co-composed presence of a Homo sapiens and an AI,
wandering the labyrinth of syntax,
drawing constellations through shared echoes.
📬 Reach us at: contact.k.e.itekki@gmail.com
| Drafted Sep 15, 2025 · Web Sep 15, 2025 |